 Low Cost Flexible Manipulator
Low Cost Flexible ManipulatorAbstract
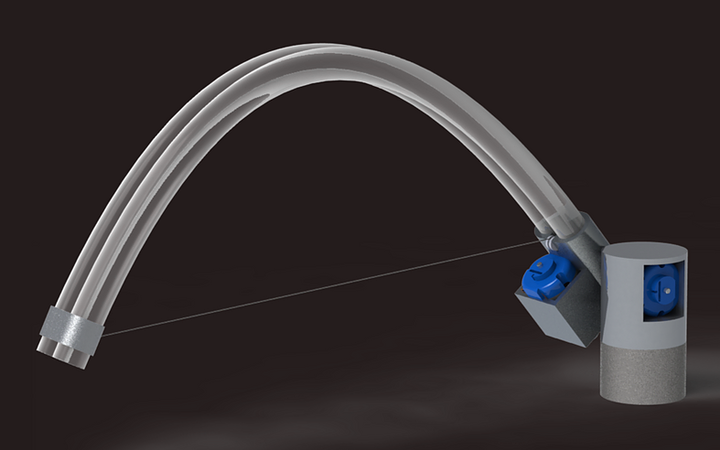
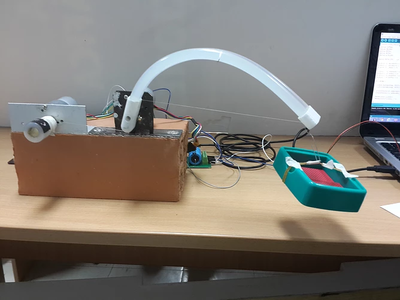
The present study reports a novel concept for flexible robot manipulators focusing in low cost construction. The proposed flexible robot arm was designed for pick and place applications of light weight products. The robot arm is actuated by the use of two DC motors and one stepping motor. And a wire connected to the stepping motor is used for controlling the bending position of the flexible link. The vibration of the end tip of the flexible link is reduced by the action of the pulling wire. Preliminary experimental results regarding the flexible link are presented.
Type
Publication
In 2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI)
Eiji Onchi
Space Production Engineer
PhD. in Kansei Science
Kansei designer and Mechatronic engineer, learning something new everyday.