 Low Cost Non-Actuated Support Arm
Low Cost Non-Actuated Support ArmAbstract
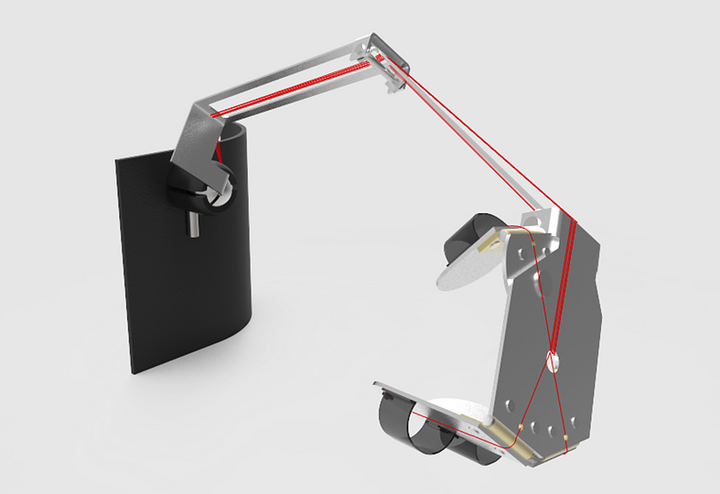
Research regarding arm supports has been done for more than 50 years. The dynamic arm supports can be classified in three major categories: non-actuated devices, passive-actuated devices and actively-actuated devices. The non-actuated devices do not require external energy operation, are low cost but do not offer all the mobility required for activities of daily living (ADL). The passive-actuated devices can store potential energy by the use of counterweights, springs and elastic bands and provide better support than the non-actuated devices but do not offer all the required mobility. On the other hand, the actively-actuated devices require external energy for operation, offer excellent mobility but are expensive. The study presented by Miyawaki demonstrates that low cost exoskeleton type devices are effective to support elderly people with disabilities on the upper arm and forearm. On the other hand, cable-driven mechanisms have demonstrated to be efficient transmission system for robot arms, but require advanced control algorithms to properly operate the robot arm. The present study shows the concept of a novel design of a non-actuated support arm for use as third arm. The design is based on the wire system used on the japanese karakuri dolls. The proposed system can have multiple applications going from medical or construction to activities of daily living.
Eiji Onchi
Space Production Engineer
PhD. in Kansei Science
Kansei designer and Mechatronic engineer, learning something new everyday.