Robot Arm Controller
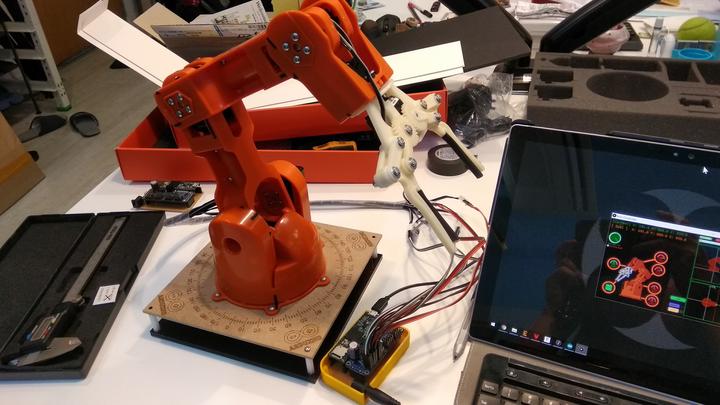
This is a custom made controller for the My Design Lab, KAIST.
Hardware
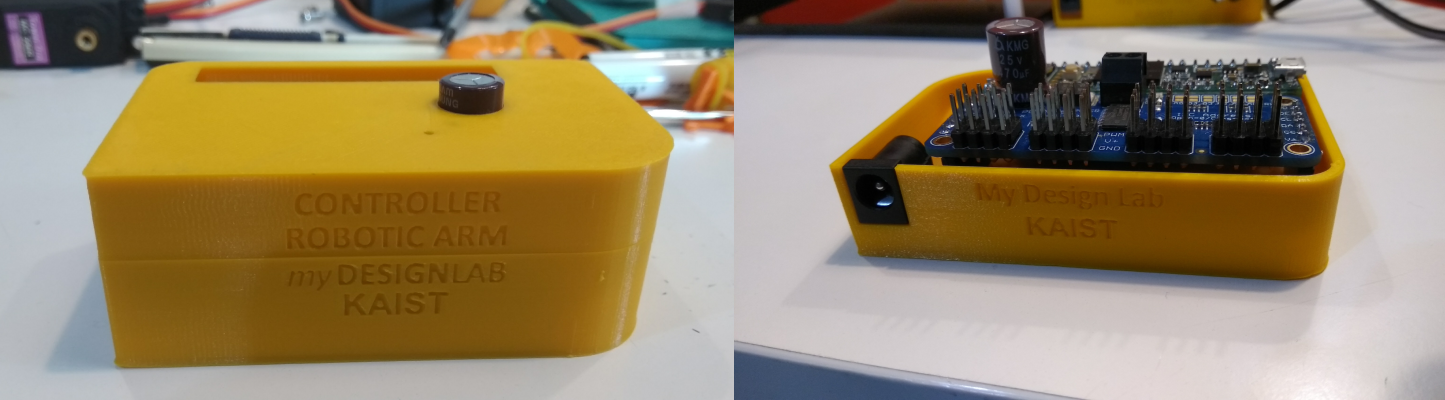
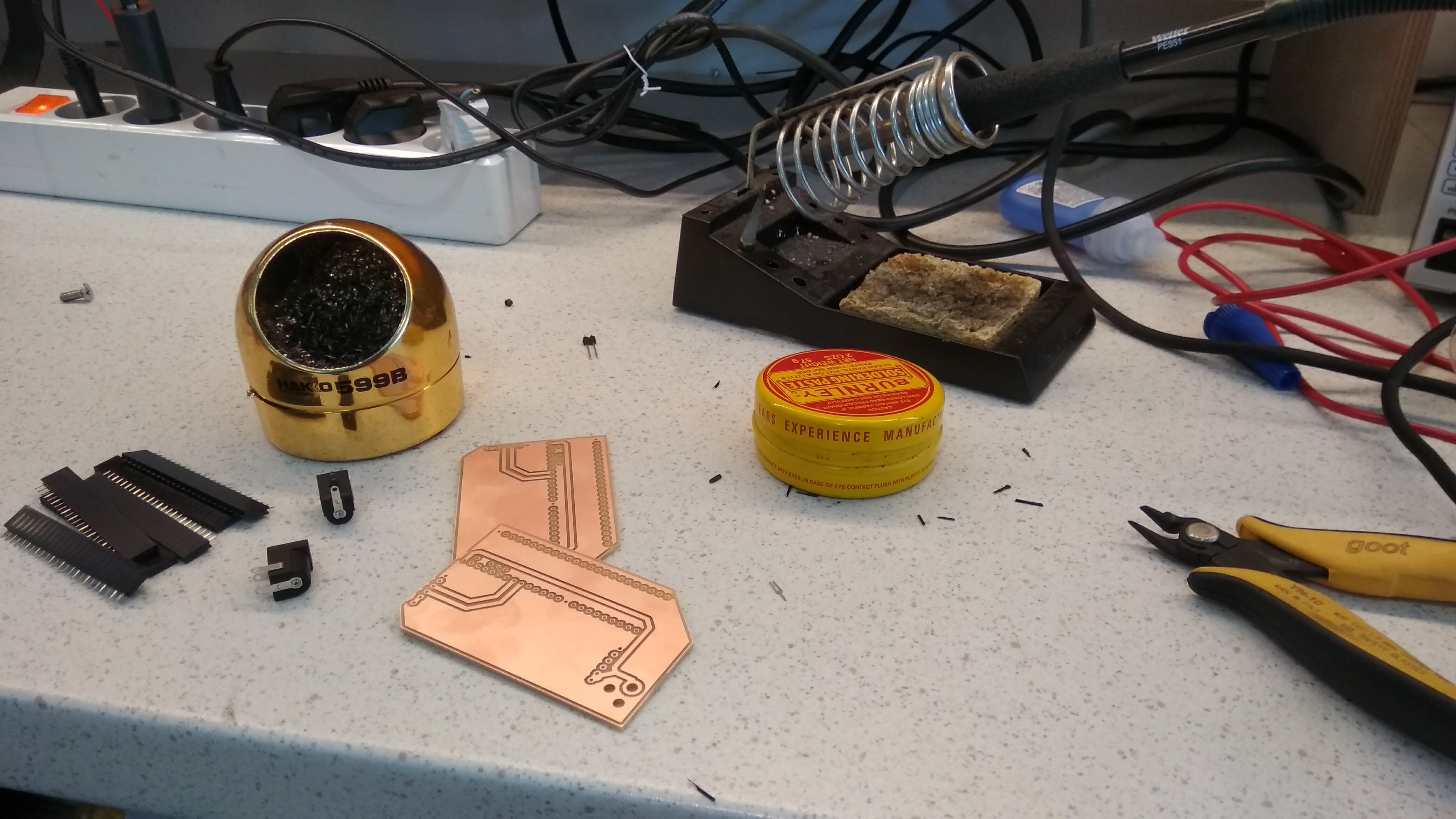
This controller uses a Teensy board with a servo hat, combined together on a custom PCB.
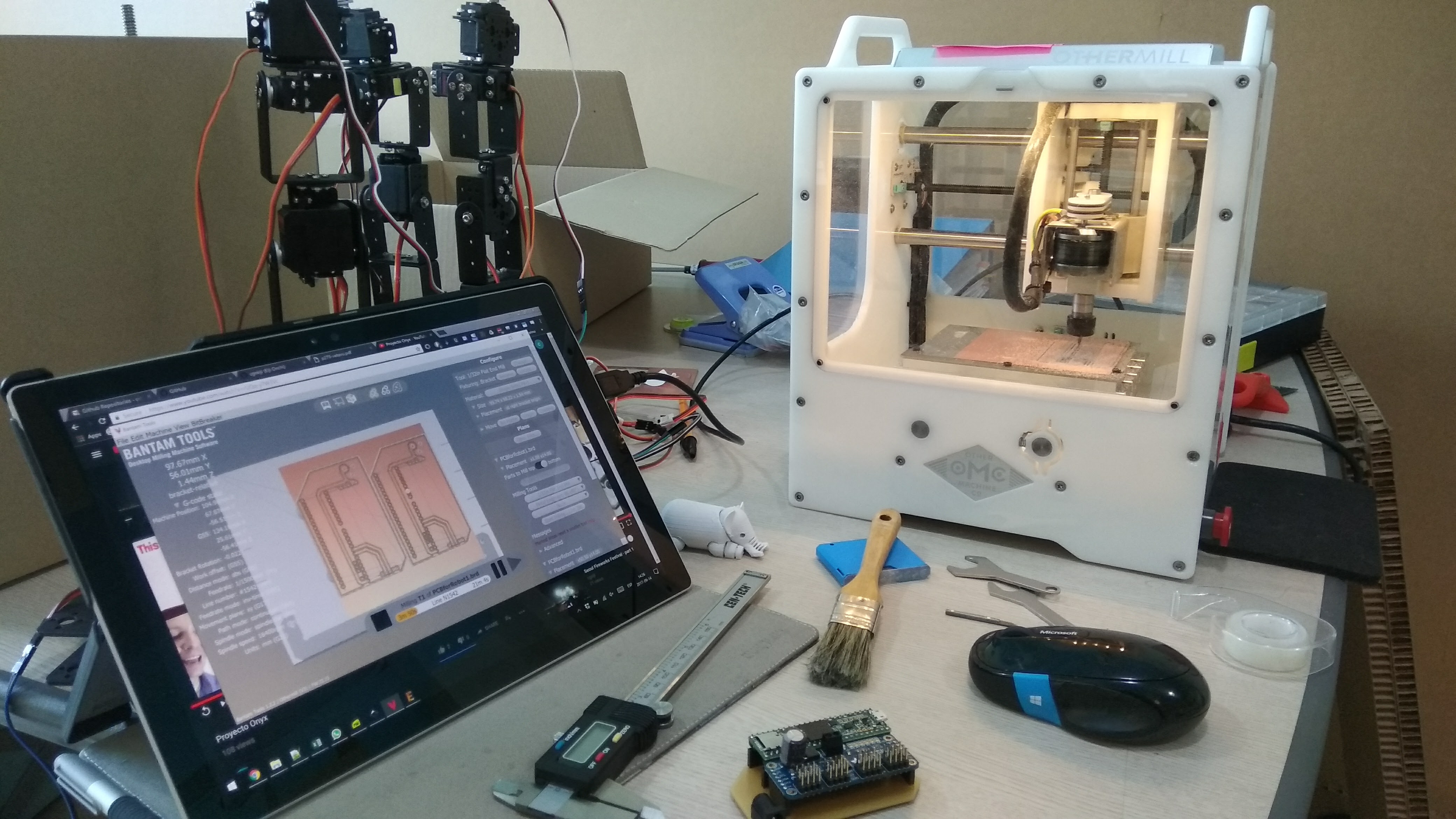

The case was designed on Fusion 360 and 3D printed to house all the electronics.
The building process is open-sourced here:
https://github.com/cgxeiji/mDL-Servo-Controller-PCB-Case
Software
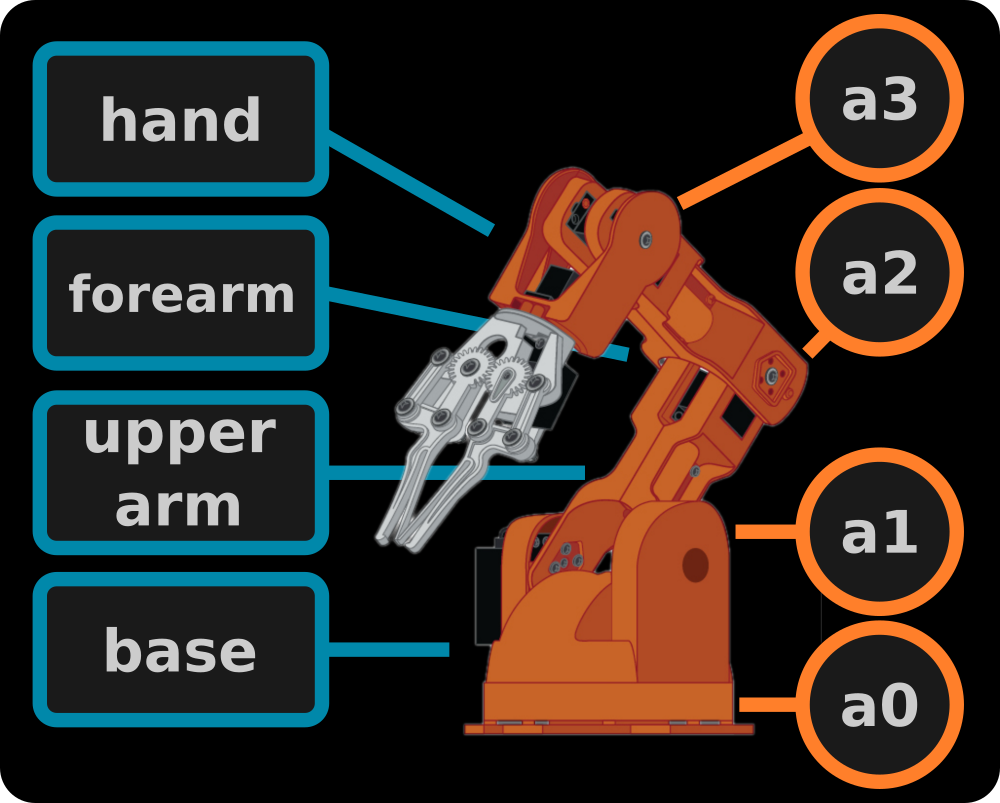
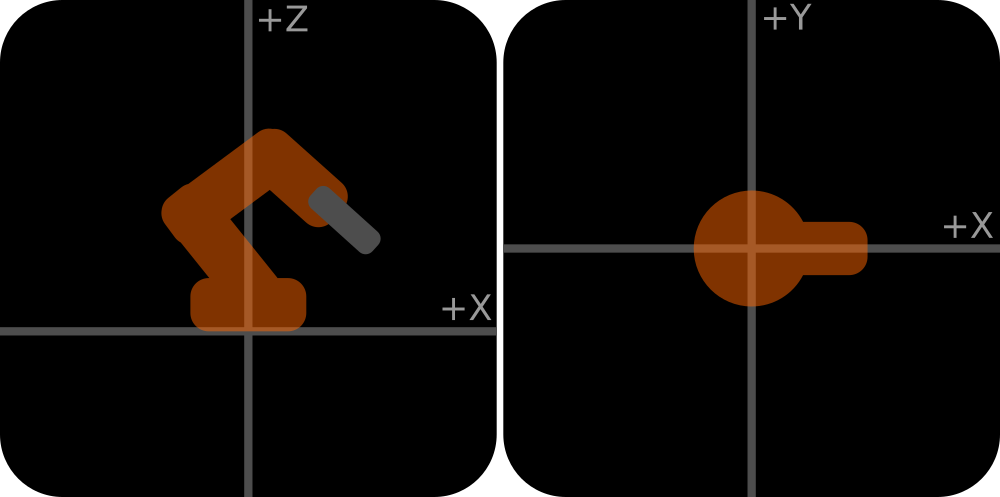
I developed an open-source library to calculate inverse kinematics on Arduino-based systems.
This system is capable of controlling a robot arm using Gcode. I developed a complementary library for Arduino-based systems to encode and decode Gcode.
You can find the source code of both libraries here:
The interface was programmed on Processing.
The interface can be downloaded from here:
Eiji Onchi
Space Production Engineer
PhD. in Kansei Science
Kansei designer and Mechatronic engineer, learning something new everyday.